Fusion GNSS LIDAR inertielle véhicule : vers une localisation plus robuste
La fusion GNSS LIDAR inertielle véhicule devient essentielle dans les systèmes de navigation de véhicules autonomes. Dans cet article, nous explorons une nouvelle méthode proposée par Cheng et al. (2025) combinant odométrie LIDAR, pré-intégration IMU et positionnement GNSS dans un cadre unifié, afin d’obtenir une localisation robuste même en milieu urbain dense ou à haute vitesse.
Pourquoi fusionner GNSS, IMU et LIDAR ?
Les approches LIDAR ou visuelles seules souffrent de dérives cumulées lors de longues trajectoires ou de pertes de signal. Le GNSS, bien qu’imparfait en ville, apporte une référence globale utile pour corriger ces dérives. En couplant les trois sources, on obtient une estimation de pose plus fiable et continue.
Une architecture modulaire efficace
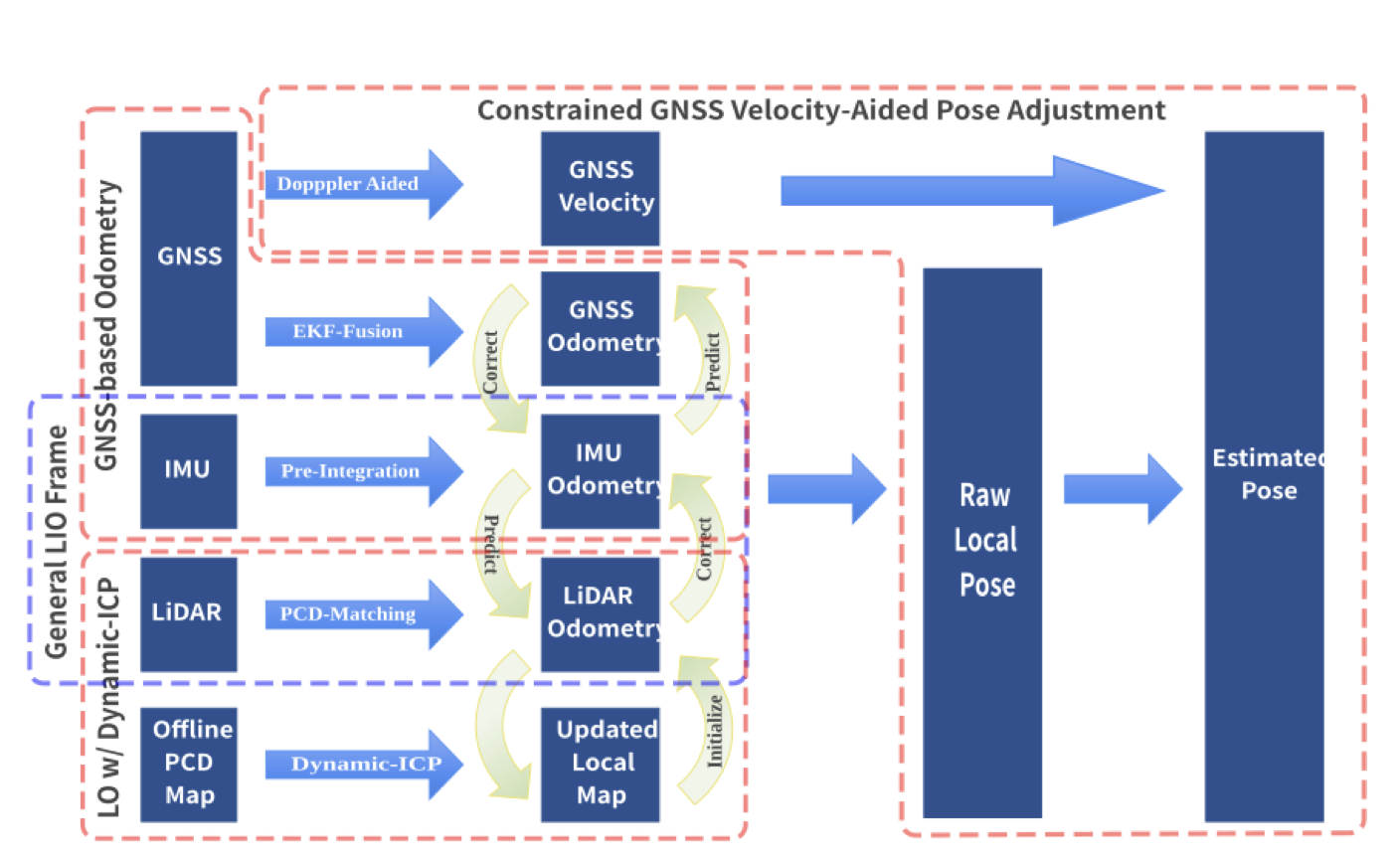
- Odométrie GNSS : utilisée pour initialiser ou relocaliser rapidement le système.
- Pré-intégration IMU : fournit une estimation rapide de mouvement entre deux mesures.
- Odométrie LIDAR avec Dynamic-ICP : méthode de recalage pointcloud plus rapide et robuste.
- Filtrage IKF contraint : améliore l’estimation des angles d’attitude avec les vitesses GNSS.
Résultats expérimentaux
Testée sur les jeux de données KITTI et HK UrbanNav, la méthode réduit l’erreur RMSE de plus de 50 % par rapport à LOAM ou NDT. La fusion adaptative (équation 18 du papier) ajuste dynamiquement la pondération GNSS selon la fiabilité estimée.
Intégration dans RoadSimulator3
Cette approche de fusion GNSS LIDAR inertielle véhicule peut enrichir RoadSimulator3, en simulant des conditions de relocalisation, de cartes préalables, ou des environnements dégradés. Une implémentation réaliste du Dynamic-ICP serait un excellent test pour valider des stratégies de fusion multi-capteurs.
🔗 Lire l’article complet sur arXiv
🔗 Voir la thèse RoadSimulator3