🧩 Simulation inertielle réaliste : bruit, inertie & logique
Une simulation inertielle réaliste ne se limite pas à dessiner une trace GPS. Pour être crédible
et exploitable en télématique, IA embarquée ou assurance, elle doit combiner trois ingrédients :
le bruit des capteurs, l’inertie du véhicule et la logique de conduite. Ce triptyque
est au cœur de RoadSimulator3, qui génère des trajectoires enrichies à 10 Hz.
1) Pourquoi ajouter du bruit ?
Les IMU/gyroscopes MEMS comportent du bruit et des dérives. Les ignorer crée une simulation
« parfaite » mais inutilisable pour évaluer la robustesse d’algorithmes. RS3 reproduit des composantes
réalistes (biais, marche aléatoire, variance d’Allan) pour confronter vos modèles à des conditions proches du terrain.
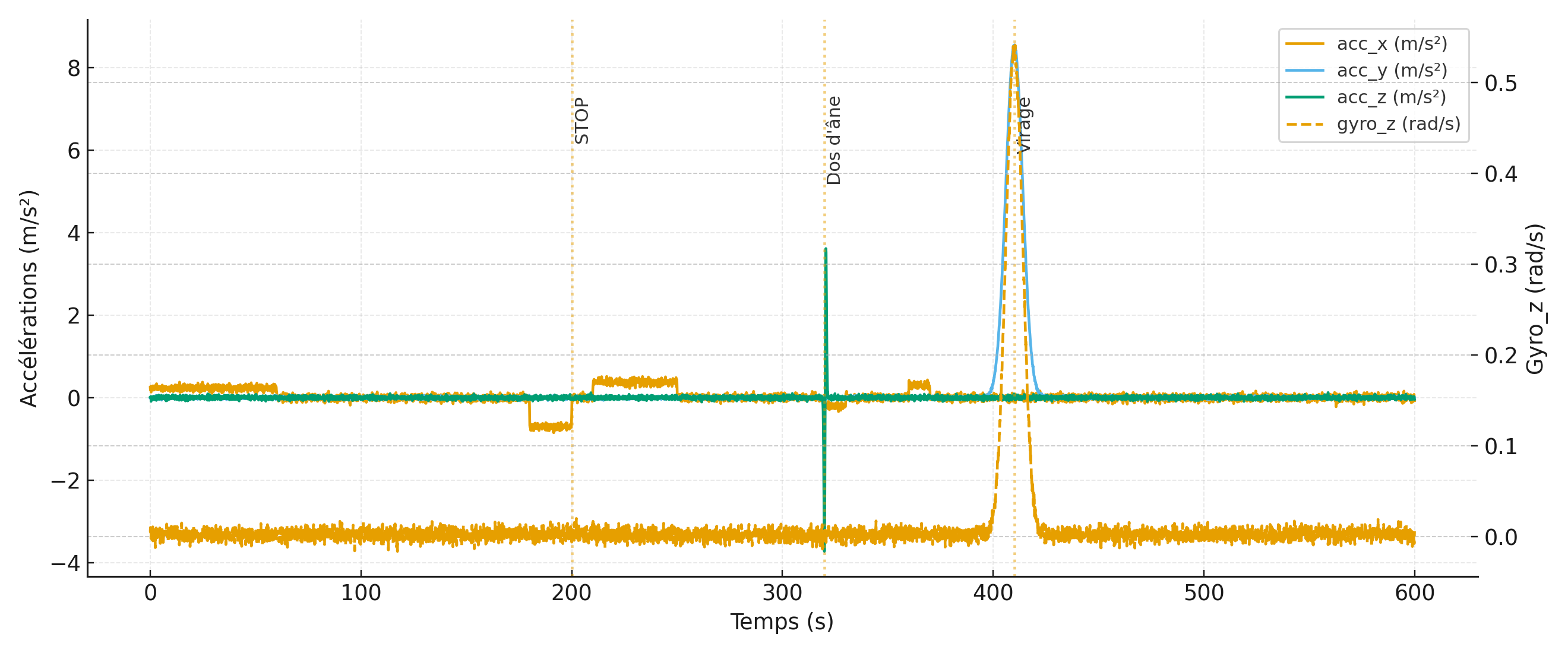
2) L’inertie : la signature physique du véhicule
Freinage, virage serré ou dos d’âne se traduisent par des motifs distincts dans
acc_x, acc_y, acc_z et gyro_x, gyro_y, gyro_z. Quelques relations utiles :
La topographie agit aussi sur l’inertie : une pente p induit une composante longitudinale
3) La logique relie le signal au contexte
- Décélération avant un feu / STOP, arrêt complet, redémarrage;
- Vitesses et inerties adaptées à la typologie (urbain, voie rapide, zone d’activité);
- Ronds-points : freinage progressif → lacet → ré-accélération mesurables.
4) Comparatif : simulation simpliste vs simulation inertielle réaliste
| Dimension | Simulation simpliste | RS3 (réaliste) |
|---|---|---|
| GPS | Itinéraire | 10 Hz (OSRM + OSMnx) |
| Inertie | ❌ | ✔ Acc. tri-axes |
| Gyroscope | ❌ | ✔ Lacet, roulis, tangage |
| Bruit capteurs | ❌ | ✔ MEMS (Allan, biais, drift) |
| Logique de conduite | ❌ | ✔ STOP, feux, rond-points |
| Contexte | ❌ | ✔ Topographie IGN, météo |
5) Applications concrètes
- Télématique : détection fiable de freinages/bruits de route (nid de poule, dos d’âne), scoring comportemental;
- IA embarquée : entraînement robuste sur jeux synthétiques bruités et inertiels;
- Smart City : analyse de zones à risques et aide à l’aménagement;
- Assurance : indicateurs explicables fondés sur signaux physiques et contexte.
Ressources & liens
- 🔗 Présentation RoadSimulator3
- 🔗 iPhone 4S → datalogger GPS/IMU 10 Hz
- 🌐 OSRM – Open Source Routing Machine
- 🌐 OSMnx – Graphes routiers OpenStreetMap
- 🌐 IGN – RGE Alti® (MNT)
- 🌐 OpenWeatherMap – API météo
- 🌐 NIST – Allan variance
Conclusion
La simulation inertielle réaliste repose sur bruit + inertie + logique. En combinant ces trois
dimensions avec la topographie et la météo, RS3 livre des données prêtes pour la production
et la recherche. Découvrez le moteur et demandez une démo.
Laisser un commentaire