Données brutes 10 Hz inertie véhicule : pourquoi les compteurs ne suffisent pas
Pourquoi parler de données brutes 10 Hz plutôt que de simples compteurs de conduite ? Parce que cette fréquence inertielle permet d’observer la réalité physique du véhicule (freinage, virage, choc), pas seulement un score de conduite marketing. C’est exactement le type de données qu’utilisent les équipes R&D mobilité et assurance dans leurs travaux techniques publics, par exemple chez TNO Automotive.
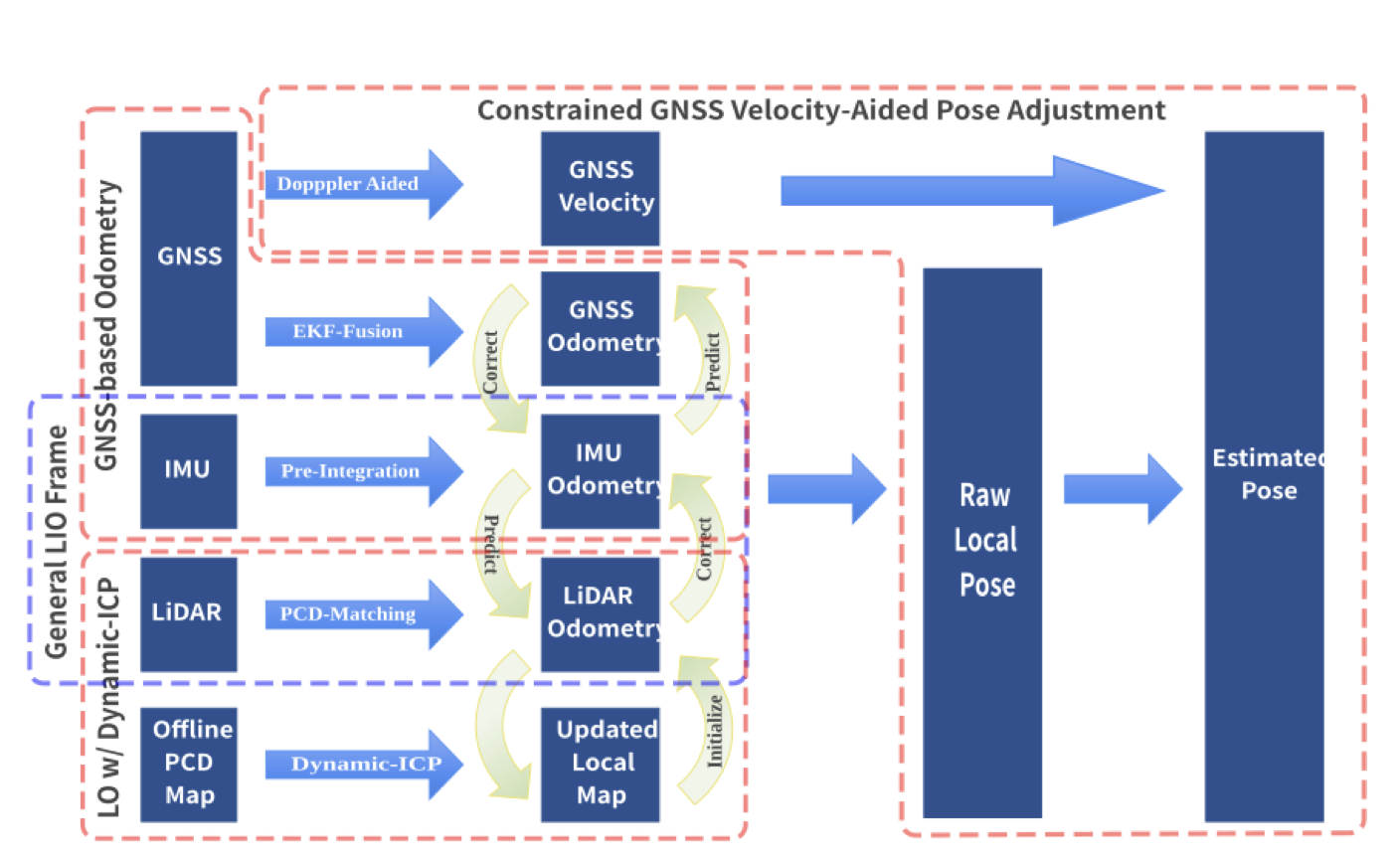
Ces données brutes 10 Hz sont au cœur de la recherche sur la mobilité intelligente et permettent d’analyser le risque routier en combinant inertie, GNSS et comportement du conducteur.

Pour mieux comprendre les enjeux de la mesure inertielle à haute fréquence, découvrez la page officielle de RoadSimulator3 (RS3), un simulateur avancé dédié à la modélisation réaliste de la conduite.
🔗 Ce billet prolonge la présentation du simulateur inertiel RS3, en expliquant pourquoi la fréquence 10 Hz et les données brutes sont indispensables à la modélisation de la conduite.
Compteurs ABC : un résumé souvent trop flou
Les compteurs ABC — Acceleration, Braking, Cornering — sont des marqueurs logiques, pas des données brutes 10 Hz. Ils signalent qu’un seuil a été franchi, sans exposer les données physiques sous-jacentes. Ils ne disent rien de :
- la valeur d’accélération maximale atteinte
- la durée exacte de l’événement
- la signature inertielle (bruit, pics, oscillations)
De plus, les seuils de déclenchement sont souvent inconnus ou propriétaires. Ce flou rend leur interprétation difficile, et leur comparaison impossible entre véhicules ou contextes.
Données brutes 10 Hz : la richesse du mouvement réel
À l’inverse, une IMU à 10 Hz vous donne acc_x, acc_y, acc_z, gyro, vitesse… synchronisés. Cela permet :
- de détecter précisément un dos d’âne
- de mesurer l’intensité d’un freinage
- d’analyser un virage via
gyro_z
C’est l’échantillonnage de la réalité, pas son résumé.
Au-delà de la simple mesure, ces données à haute fréquence jouent un rôle crucial dans la sécurité routière. En capturant avec précision les comportements du conducteur et les événements routiers (comme les dos d’âne, freinages brusques, ou virages serrés), elles permettent d’identifier les situations à risque. Ces informations alimentent des modèles statistiques et algorithmiques qui évaluent le risque de collision ou d’accident, facilitant ainsi la mise en place de systèmes d’alerte précoces, l’amélioration des infrastructures, et la personnalisation des conseils de conduite.
Pourquoi la granularité 10 Hz est indispensable
À 1 Hz, vous ratez les variations soudaines. À 10 Hz, vous captez les détails du geste : freinage, choc, virage. C’est cette granularité temporelle qui permet la détection fine et la simulation réaliste.
Cette granularité est aussi au cœur de nombreux usages pratiques. En diagnostic de conduite, elle permet d’identifier précisément les comportements à risque ou inefficaces. Dans le secteur de l’assurance, ces données fines facilitent la tarification basée sur la conduite réelle (assurance comportementale). Pour l’éco-conduite, elles offrent un retour détaillé permettant d’optimiser la consommation de carburant. Enfin, en maintenance prédictive, l’analyse des vibrations et accélérations à haute fréquence permet de détecter précocement des anomalies mécaniques, évitant ainsi des pannes coûteuses.
Pour en savoir plus sur l’importance de la mesure inertielle, consultez également ce rapport de l’ETSI sur les capteurs embarqués.
Comparatif synthétique
| Compteurs « ABC » classiques |
Données brutes 10 Hz (IMU + GNSS) |
| Information binaire (flag « freinage fort ») |
Valeurs continues (acc_x, acc_z, gyro_z, vitesse…) |
| Seuils opaques ou arbitraires |
Unités physiques mesurées (m/s², °/s, m/s) |
| Profil d’événement inconnu |
Forme et durée mesurables (pic, plateau, relâchement) |
| Non réplicable / non simulable |
Rejouable, comparable, intégrable dans la simulation RS3 |

Au‑delà de la donnée : vers la compréhension du geste conducteur
La mesure inertielle haute fréquence ouvre la voie à une analyse comportementale avancée du conducteur. En observant la dynamique fine des gestes, il devient possible de modéliser des aspects humains complexes tels que la fatigue, l’anticipation ou la régularité de conduite. Cette compréhension approfondie permet non seulement d’améliorer la sécurité mais aussi d’adapter les systèmes d’assistance à la conduite (ADAS) aux profils individuels, contribuant ainsi à une conduite plus sûre et plus confortable.
Pourquoi RoadSimulator3 mise sur le 10 Hz et pas seulement sur des compteurs
Parce qu’une vraie science de la conduite passe par : des signaux capteurs simulés, un export inertiel + GNSS à 10 Hz, et une fidélité temporelle complète.
Cette approche positionne RoadSimulator3 en phase avec les attentes des chercheurs et industriels. Elle facilite la simulation précise des risques routiers, le développement et la calibration des systèmes avancés d’aide à la conduite (ADAS), ainsi que la validation de modèles d’éco-conduite. En offrant une plateforme réaliste et détaillée, RS3 contribue activement à l’innovation dans le domaine de la mobilité intelligente.
En clair : si vous n’avez pas accès aux données brutes 10 Hz, vous ne pouvez pas qualifier finement le risque conducteur, ni modéliser l’impact énergétique d’un trajet, ni rejouer la scène en simulation. Et ça, ni un compteur « Freinage fort », ni un score conducteur sur 5 étoiles ne vous le donneront.
Cette approche positionne RoadSimulator3 en phase avec les attentes des chercheurs et industriels. Elle facilite la simulation précise des risques routiers, le développement et la calibration des systèmes avancés d’aide à la conduite (ADAS), ainsi que la validation de modèles d’éco-conduite. En offrant une plateforme réaliste et détaillée, RS3 contribue activement à l’innovation dans le domaine de la mobilité intelligente.