Sur le papier, un virage routier OSM ou IGN, c’est juste “la route qui tourne”. Dans la réalité métier, c’est un indicateur critique. C’est là que les conducteurs freinent tard, que la voiture prend du roulis, que la consommation explose, que les sinistres arrivent. Aujourd’hui, on s’en remet à des cartes qui décrivent ces virages de façon plus ou moins fidèle. Problème : si la géométrie est approximative, tout ce qu’on calcule derrière est faux — évaluation du risque conducteur, scoring d’éco-conduite, calibration ADAS, simulation inertielle. Dans ce billet, on montre pourquoi deux sources pourtant « sérieuses » (OpenStreetMap et l’IGN) ne racontent pas exactement la même route, et pourquoi ça compte pour l’industrie, pas juste pour les géomaticiens.
Pour plus d’informations, consultez la base OpenStreetMap ou la BD TOPO® de l’IGN.
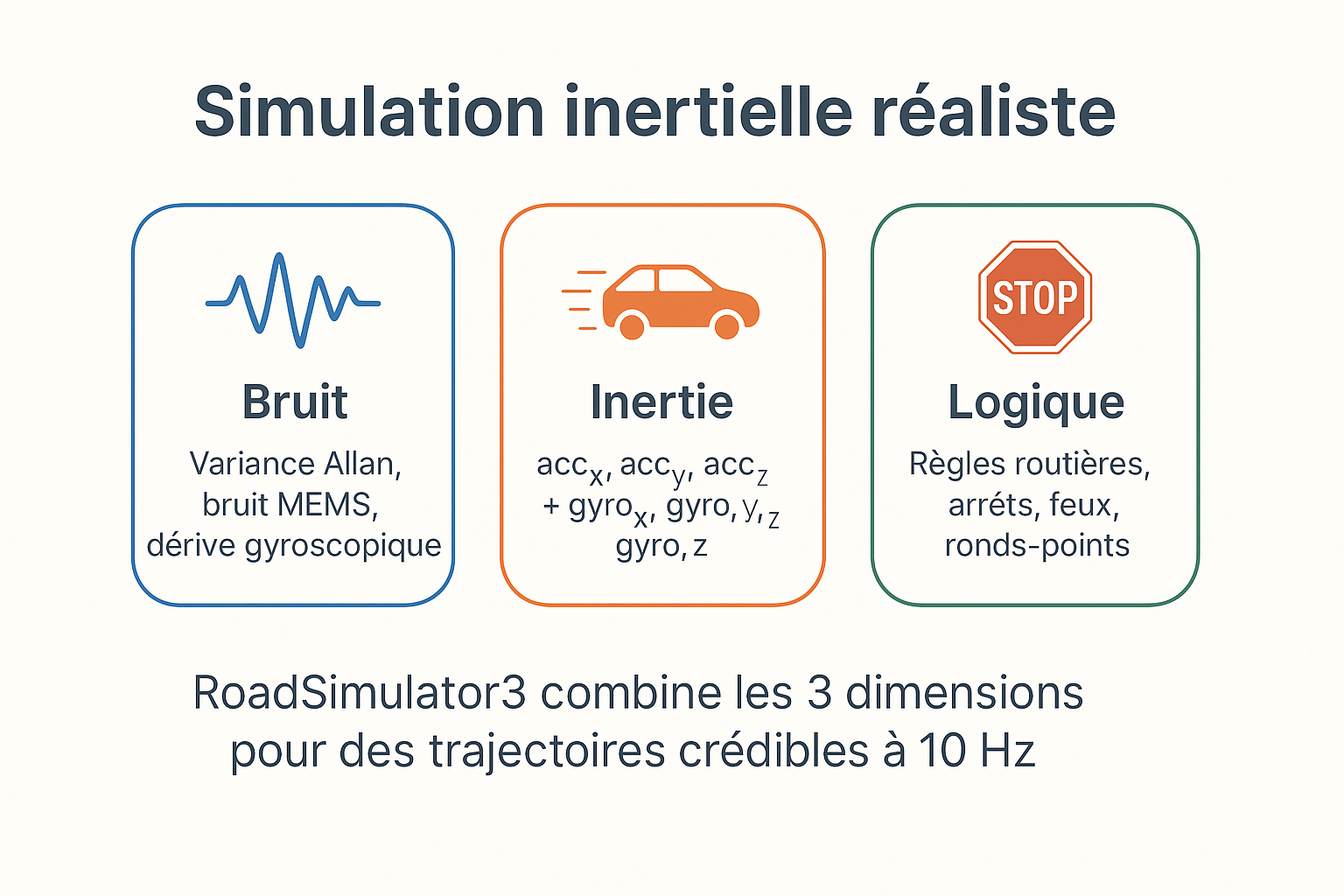
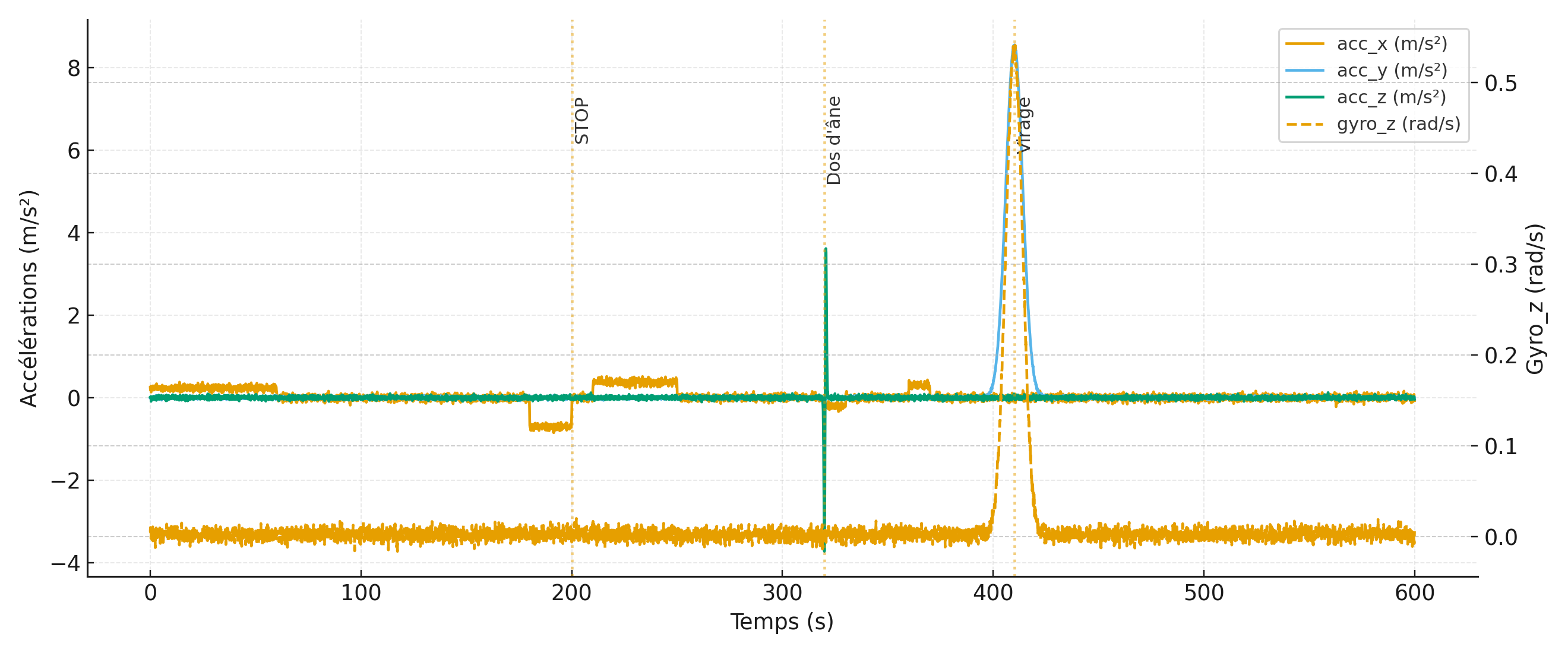
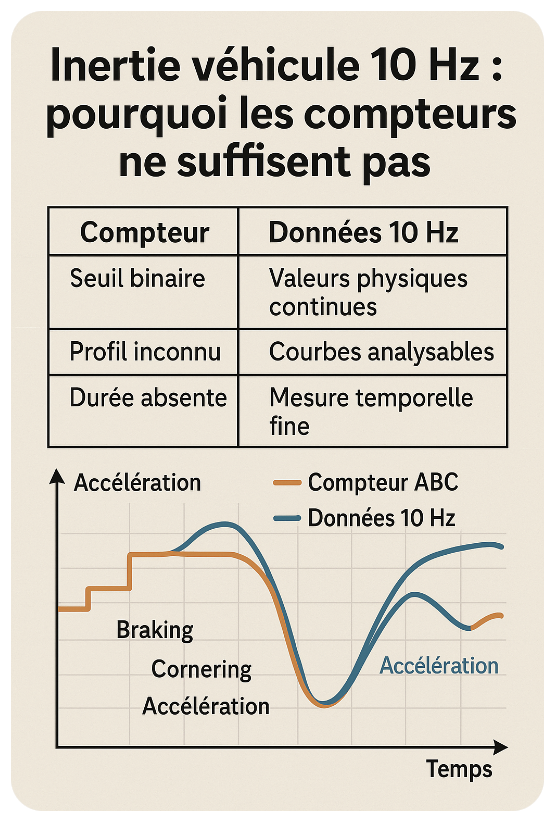
Retrouvez également notre article sur la simulation inertielle 10 Hz avec RoadSimulator3.

Pourquoi comparer OSM et IGN ?
Les virages sont bien plus que de simples courbes sur une carte. Ils influencent directement la sécurité routière, le confort des passagers, la consommation énergétique. Ils ont aussi un impact sur l’efficacité des systèmes d’aide à la conduite ou des simulateurs. Pourtant, une question simple reste ouverte : quelle est la vraie géométrie d’un virage ?
Une même route, deux géométries différentes
Dans notre étude, nous avons comparé deux grandes sources de données cartographiques :
• OpenStreetMap (OSM) : une base mondiale, collaborative et ouverte.
• BD TOPO® de l’IGN : une base nationale française, construite par des géomaticiens professionnels.
Premiers résultats : les deux sources ne décrivent pas les virages de la même manière. OSM tend à simplifier les géométries (les virages apparaissent plus « anguleux »), tandis que l’IGN conserve une description plus fine. Ces différences sont invisibles à l’œil nu sur une carte. Elles ont un impact direct sur le calcul du rayon de courbure, et donc sur tout ce qui en dépend (sécurité, simulation, éco-conduite).
Ces différences de courbure routière OSM influencent directement la perception du virage et les modèles de simulation.
⸻
Vers un référentiel géométrique des virages
🎯 Notre ambition : construire un référentiel des virages
Nous ne voulons pas seulement comparer des chiffres. Notre ambition est plus large : créer un véritable référentiel des virages. Ce sera un cadre géométrique robuste qui s’appuie sur les principes de l’ingénierie routière (clothoïdes, arcs, lignes droites).
Pourquoi ?
• Pour mieux évaluer la qualité des données cartographiques.
• Pour fournir une base de travail cohérente et exploitable par les chercheurs, les industriels et les collectivités.
• Pour améliorer les simulations inertielles de RS3, en les rapprochant de la réalité physique des routes.
⸻
Impacts pour la simulation inertielle et la sécurité flotte
🚀 Une étude structurante
Ce travail est structurant pour le projet RoadSimulator3 : il ne s’agit pas d’un simple module technique, mais d’un socle commun qui permettra d’évaluer, comparer et exploiter différentes sources de données routières.
En résumé, une meilleure compréhension de la courbure routière OSM ouvre la voie à des modèles plus robustes et à une analyse fine du comportement conducteur.
Conclusion
Notre conviction : en construisant un référentiel de virages robuste, nous poserons les bases d’une meilleure compréhension des routes. Nous ouvrirons la voie à des applications concrètes — de la sécurité routière à l’éco-conduite, en passant par la simulation et la mobilité intelligente.
⸻
👉 Vous pouvez retrouver notre premier post sur le sujet ici : OSM vs IGN : tous les virages ne se ressemblent pas.