Gyroscope simulation inertielle véhicule : données amputées sans rotation
Dans toute simulation inertielle véhicule, le gyroscope joue un rôle central.
Sans lui, la trajectoire perd la cohérence des virages et rotations.
Un gyroscope oublié équivaut à des données amputées, et cet article détaillé (≈3000 mots) montre pourquoi, en explorant la physique, les capteurs, les algorithmes et les usages industriels.
1. Les limites des accélérations linéaires
Un système inertiel embarqué repose d’abord sur les accéléromètres. Ces capteurs mesurent les accélérations dans trois axes : longitudinal (avant/arrière), latéral (gauche/droite) et vertical (haut/bas). Dans une simulation inertielle véhicule, ces données traduisent :
- Accélération longitudinale : un freinage ou une accélération droite.
- Accélération latérale : la force ressentie dans un virage.
- Accélération verticale : bosses, nids de poule, dos d’âne.
Par exemple, un freinage de -4 m/s² traduit un appui fort sur la pédale de frein.
Une accélération latérale de 3 m/s² correspond à un virage serré pris à vitesse élevée.
Mais ces informations restent ambigües : elles ne disent pas si le véhicule a changé d’orientation, ni à quelle vitesse il a pivoté.
1.1 Exemple concret sans gyroscope
Un véhicule peut perdre 20 km/h en 2 secondes. Deux scénarios sont possibles :
- Un freinage sec en ligne droite.
- Un virage serré où la perte de vitesse est due à la courbure.
Les accéléromètres donneront une information similaire (décélération longitudinale), mais la dynamique réelle est totalement différente.
Sans gyroscope, la simulation inertielle véhicule ne permet pas de trancher.
2. Le rôle indispensable du gyroscope
Le gyroscope mesure la vitesse angulaire : le taux de rotation du véhicule autour de ses trois axes (roulis, tangage, lacet).
En clair, il capture « combien de degrés par seconde » le véhicule pivote.
2.1 Axes de rotation
- Roll (gyro_x) : inclinaison latérale (virage, dévers).
- Pitch (gyro_y) : cabrage ou plongée (accélération ou freinage fort).
- Yaw (gyro_z) : rotation horizontale (virages, rond-points).
Dans une simulation inertielle véhicule, ignorer ces composantes revient à supprimer la mémoire du virage.
On ne peut plus distinguer une trajectoire sinueuse d’une ligne droite ponctuée de freinages.
2.2 Cas d’usage typiques
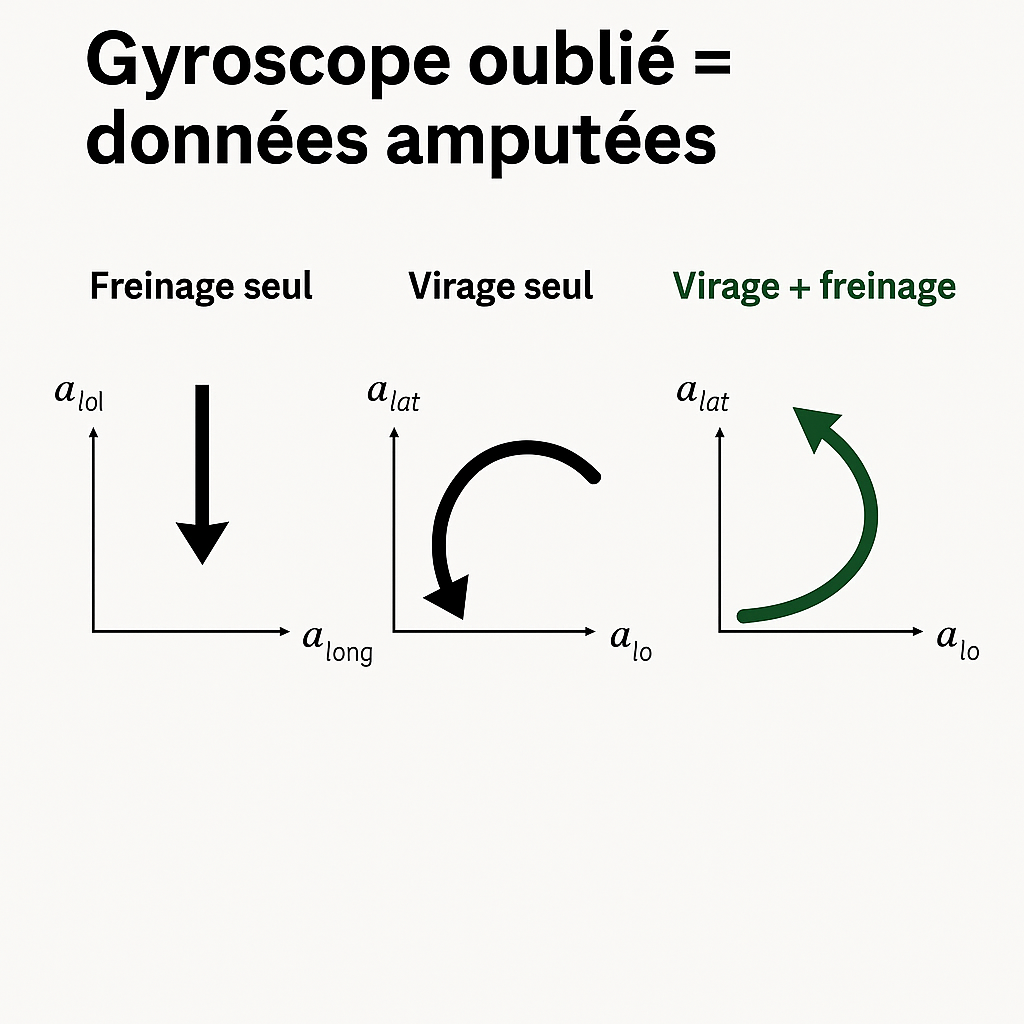
- Virage avec freinage : seule la combinaison accélération longitudinale + vitesse angulaire révèle la manœuvre réelle.
- Changement de voie subtil : l’accélération latérale est faible, mais le gyroscope montre une rotation caractéristique.
- Rond-point : séquence continue de rotation en lacet, invisible sans gyroscope.
3. Gyroscopes MEMS et réalités physiques
La majorité des véhicules connectés et smartphones utilisent des gyroscopes MEMS (Micro Electro Mechanical Systems).
Ces capteurs miniaturisés détectent la rotation par effet Coriolis. Leur avantage : faible coût, faible consommation, intégration facile.
Leur inconvénient : bruit stochastique et dérive à long terme.
3.1 Le bruit stochastique
Le signal d’un gyroscope MEMS est toujours perturbé par des fluctuations aléatoires.
Dans une simulation, il faut reproduire ce bruit pour coller à la réalité.
Un gyroscope « parfait » serait irréaliste et tromperait les algorithmes de traitement.
3.2 La dérive
Avec le temps, un gyroscope MEMS accumule une erreur (bias drift).
C’est pourquoi les systèmes embarqués utilisent souvent une fusion GNSS+IMU (GPS corrige la dérive du gyro, et le gyro comble les trous GPS).
4. Simulation gyroscopique dans RoadSimulator3
RoadSimulator3 intègre pleinement le gyroscope dans la simulation inertielle véhicule.
Concrètement, cela signifie :
- Production des signaux gyro_x, gyro_y, gyro_z sur toute la trajectoire.
- Ajout d’un bruit stochastique calibré sur des publications scientifiques (Hemerly, 2017).
- Possibilité d’activer une dérive gyroscopique pour tester la robustesse des algorithmes IA et télématiques.
Ces données rendent possible :
- La détection réaliste d’événements routiers (freinages, virages, dos d’âne).
- La génération de datasets synthétiques utilisables par les chercheurs.
- La validation de systèmes embarqués (ADAS, conduite autonome, télématique).
4.1 Exemple visuel
Voici une représentation schématique des trois cas typiques :
5. Applications industrielles et scientifiques
L’ajout du gyroscope dans une simulation inertielle véhicule ouvre de multiples cas d’usage :
- Assurances et télématique : scoring conducteur fiable, différenciation freinage vs virage.
- Constructeurs automobiles : validation des systèmes ADAS.
- IA embarquée : datasets synthétiques réalistes pour apprentissage.
- Recherche académique : étude des limites GNSS en milieu urbain, correction via inertiel.
5.1 Exemple assurance
Sans gyroscope, un freinage avant rond-point peut être noté comme « conduite brutale ».
Avec gyroscope, le système sait qu’il s’agit d’une manœuvre normale et sécurisée.
6. Comparaison avec d’autres simulateurs
| Simulateur | Trajectoire GPS | Inertie | Topographie | Météo | Gyroscope |
|---|---|---|---|---|---|
| RoadSimulator3 | ✔ | ✔ | ✔ | ✔ | ✔ |
| SUMO | ✔ | ❌ | ❌ | ❌ | ❌ |
| CARLA | ✔ | ✔ | Partiel | ❌ | ✔ |
7. Conclusion
Un GPS seul donne la route. Un accéléromètre ajoute l’inertie.
Mais c’est le gyroscope qui garantit la cohérence et la fidélité de la simulation inertielle véhicule.
L’ignorer, c’est amputer la donnée et induire en erreur l’IA, la télématique et les chercheurs.
Voir aussi :
IEEE – Inertial Measurement and Gyroscope in Vehicle Simulation.
Références
- Hemerly, E.M. et al. (2017), Stochastic Modeling of MEMS IMU Errors
- Harbers et al. (2023), Boundaries Enhancing Vehicle Simulation
- IGN RGE Alti®, OSRM, OpenWeatherMap
- Yurtsever et al. (2020), Survey Autonomous Driving
Laisser un commentaire